







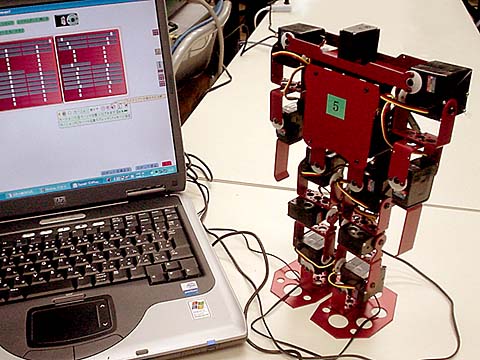
Robovie-MS
ここでは、スクイーク(eToys)からRobovie-MSを制御する方法を説明する。
用語
- Robovie-MS
- ATRとヴィストンが開発したロボットの名称。以下、単にロボットと言った場合はこれを指す
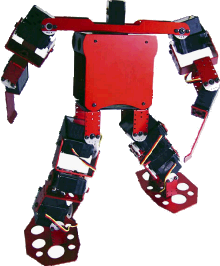
- サーボモータ
- 任意に軸の角度を決めることのできるモータ。可動範囲は-90度から90度まで。ロボットは関節として17個のサーボモータを持つ(17自由度)

- スライダ
- スクイークの部品。ノブをドラッグすることで数値を設定できる。他の部品と同じく、スクリプトで制御することもできる。ここでは、それぞれのサーボモータの角度を設定するために用いる

- 入れ物
- スクイークの部品を集合の要素として持つことのできる部品。要素には順序がある。また、注目する要素を示すためのカーソルを持つ
- ポーズ
- スライダを要素として保持する入れ物。ロボットの状態を表している。スライダは28個あるが、実際に使えるのは17個。このポーズに対して「メッセージ送信」を行うことで、スクイーク上の状態が実際のロボットに反映される

- モーション
- ポーズを要素として保持する入れ物。カーソルが指すポーズへの「メッセージ送信」とカーソル位置のインクリメントを繰り返すことで、連続した動きを表現できる。これはアニメーションと同じである
起動
- ロボットに電源ケーブルとシリアルケーブルを接続
- PCにシリアルケーブルを接続し、ポート番号を確認する
- スクイークを起動し、「ナビゲータ」フラップの「探す」ボタンでRobovieMSController.prを開く
- 「シリアルポートの番号」を確認したポート番号に合わせ、「シリアルポート リセット」ボタンを押す
- ロボットを寝かし、手足を伸ばしてから「ポーズ初期化」ボタンを押す。急に動くので注意
終了
- ロボットを寝かしてから「ポーズ モータオフ」ボタンを押し、ロボットが脱力することを確認する
- 「シリアルポート 閉じる」ボタンを押す
- スクイークを終了し、各ケーブルを外す
初期設定
- 起動する
- ロボットを立たせ、「ロボット初期設定」フラップを開いて、各モータのスライダを調整し「ポーズ初期化」ボタンを押す。これをすべてのモータの位置が中立になるまで繰り返す
- 「ナビゲータ」フラップの「公開する!」ボタンを押し、設定を保存する。設定値はロボットの個体ごとに異なるので注意
- 終了する
関節を動かす
- 起動する
- ロボットを立たせ、「ポーズ」のスライダを設定して「ポーズ メッセージ送信」ボタンを押す。これにより、それぞれのスライダが示す関節を動かすことができる。
- 終了する
モーションの作成
- 起動する
- 「ロボット部品」フラップから「モーション」をドラッグし、ワールド(背景)にドロップする
- 「ロボット部品」フラップから「ポーズ」をドラッグし、先ほど取り出した「モーション」にドロップする。これを2回繰り返す
- それぞれのポーズのスライダを適当にセットする。最初はあまり変えないほうが良い(特に下半身)
- 「モーション」のビューワを開き、「動かす」スクリプトをチクタクする。設定したポーズにしたがってロボットが動く。ポーズを変えたり。増やしたりしても良い
- 「動かす」スクリプトをポーズする
- 終了する
関節をハンドルで制御する
- 起動する
- ハンドルの絵を描き、ハンドルと言う名前を付ける
- ポーズ上のスライダのビューワを開く(ここでは「右肩」)
- カテゴリを「基本」に変え、「数値」を代入するタイルをドラッグしてスクリプトにする
[右肩の][数値 ←][90.00]
- ハンドルのビューワを開き、「向き」のタイルをドラッグして右肩の数値を置き換える
[右肩の][数値 ←][ハンドルの][向き]
- ポーズのビューワを開き、[ポーズ][メッセージ送信]をドラッグしてスクリプトの2行目に入れる
[右肩の][数値 ←][ハンドルの][向き]
[ポーズ][メッセージ送信]
- スクリプトの時計アイコンを長押しし、刻み値を1にする(これより多いと暴走の原因となる)
- スクリプトをチクタクし、ハンドルを動かす。するとハンドルの角度に応じて関節が動く
- スクリプトをポーズする
- 終了する
加速度センサで車を操縦する
- 起動する
- 車の絵を描き、車と言う名前を付ける
- 車のビューワを開き、円を描くスクリプトを作る
[車][を進める][5]
[車][を回す][5]
- ポーズのビューワを開く
- [ポーズ][加速度更新]を1行目に入れる
[ポーズ][加速度更新]
[車][を進める][5]
[車][を回す][5]
- [ポーズの][y軸の加速度]をドラッグして「進める」の数値を置き換える
[ポーズ][加速度更新]
[車][を進める][ポーズの][y軸の加速度]
[車][を回す][5]
- [ポーズの][x軸の加速度]をドラッグして「回す」の数値を置き換える
[ポーズ][加速度更新]
[車][を進める][ポーズの][y軸の加速度]
[車][を回す][ポーズの][x軸の加速度]
- スクリプトをチクタクし、ロボットを傾ける。するとロボットの縦横の傾きに応じて車が動く
- スクリプトをポーズする
- 終了する
Link to this Page
- 世界聴診器をめぐる冒険 last edited on 21 January 2010 at 11:27:23 pm by 61.245.57.81.er.eaccess.ne.jp
