なのぼ~どにモーターを接続する方法
NanoBoardAGをお持ちの方は
NanoBoardAGの使い方
をお読みください。
MTM07
で展示した
なのぼ~ど
による
Scratch
から制御できる
WeDo
に似た何かの作り方です(
動画
)。
これとレゴ(
Lego Crazy Action Contraptions
)を組み合わせた
レゴなのか~
(
動画
)、
レゴなのげ~た~
(
動画
)、
レゴなのどっぐ
(
動画
、
作り方のスライドショー
)、
レゴなのろいど3
(
動画
、
シミュレーション
)も合わせてどうぞ。
Scratchによるプロジェクトの例は
フィジカルコンピューティングの例題
にあります(
動画
)。
ちっちゃいものくらぶで、オールインワンでブレッドボードの配線が不要な
NanoBoardAG
を開発中です。既存のなのぼ~どにはドーターボードの
なのも
が用意される予定です。
なのぼ~どにモーターを接続する方法を説明します。
これは一例で、スケッチやピン番号などの変更で
Arduino
や
HelloBoard
などでも使えます。
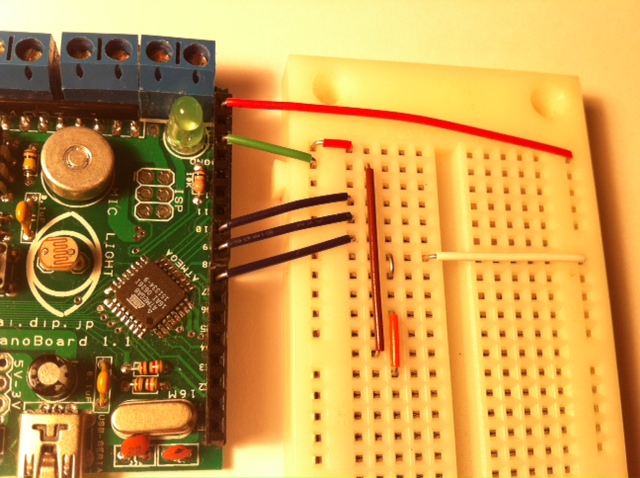
1. ブレッドボードの配線
ブレッドボードの配線例を以下に示します。
記号はブレッドボードの座標。色は使うジャンプワイヤーの色です。
ブレッドボードはマルツ電子の
165-40-3010E
、ジャンプワイヤーは
165-012-000E
を想定しています。
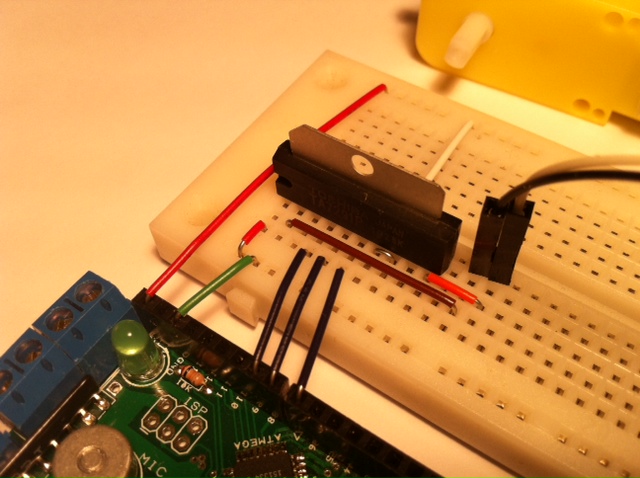
モータードライバーは秋月電子などで購入できる東芝の
TA7291P
を使っています。
モーターはマブチの130モーターの同等品です。ノイズキラーコンデンサー、電流制限抵抗は必要に応じて入れてください。
必要な部品一式がちっちゃいものくらぶから
購入可能
になりました。
J1
Y
赤(短)
I2
I12
茶
H7
H8
銀
H10
H13
橙
F7
X
白
X
なのぼ~どAREF(+5V)
赤(長)
Y
なのぼ~どGND
緑
J4
なのぼ~ど9(D9 PWM)
紫
J5
なのぼ~ど8(D8)
紫
J6
なのぼ~ど7(D7)
紫
G1~G10
1~10(TA7291P モータードライバーIC)
F12~J12
モーター黒
F13~J13
モーター白
モーターの代わりにLEDや圧電スピーカーなどを取り付けても構いません。
LEDを使う場合は必要に応じて電流制限抵抗を直列に入れてください。
ブレッドボードの配線
モータードライバーICとモーターの差し込み
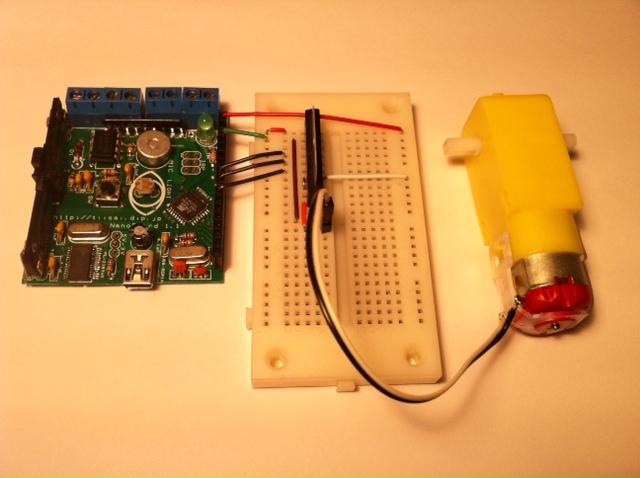
完成
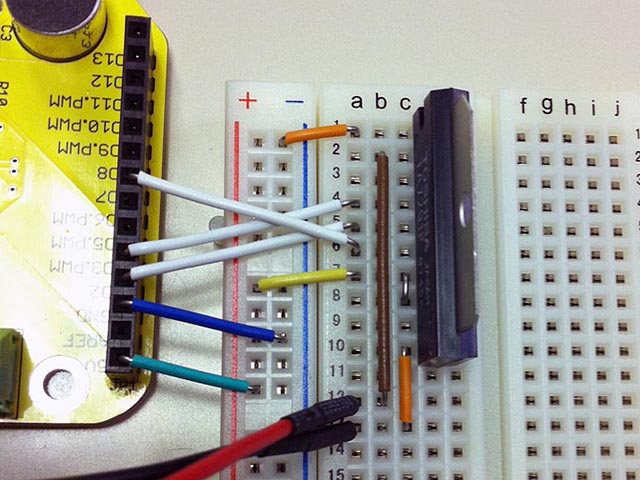
HelloBoardの配線例(参考)
2. なのぼ~どの動作確認
なのぼ~どのセンサボード部分について、以下の方法でドライバーのインストールと動作確認を行います。確認後、Scratchを終了してください。
http://scratch-ja.org/checkingnanoboard
3. boards.txtの変更
Arduino IDE
をダウンロードし、インストールします(動作確認はArduino 0023まで)。
Arduino IDEをインストールしたフォルダーの中にある\hardware\arduino\boards.txtを適当なエディターで開きます。
なのぼ~どのバージョン(基板のシルク印刷)により、以下のいずれかを末尾にコピー&ペーストし、保存します。
NanoBoard 1.2以降(AGを含む)の場合
##############################################################
atmega8o8.name=[Optiboot] ATmega8 8MHz
atmega8o8.upload.protocol=stk500
atmega8o8.upload.maximum_size=7680
atmega8o8.upload.speed=115200
atmega8o8.bootloader.low_fuses=0x94
atmega8o8.bootloader.high_fuses=0xDC
atmega8o8.bootloader.path=optiboot
atmega8o8.bootloader.file=optiboot_atmega8-8m.hex
atmega8o8.bootloader.unlock_bits=0x3F
atmega8o8.bootloader.lock_bits=0x0F
atmega8o8.build.mcu=atmega8
atmega8o8.build.f_cpu=8000000L
atmega8o8.build.core=arduino
##############################################################
NanoBoard 1.1以前の場合
###########################################
# Optiboot Arduino support
# http://optiboot.googlecode.com
# Peter Knight, 2010
atmega8o.name=[Optiboot] Arduino NG or older w/ ATmega8
atmega8o.upload.protocol=stk500
atmega8o.upload.maximum_size=7680
atmega8o.upload.speed=115200
atmega8o.bootloader.low_fuses=0xbf
atmega8o.bootloader.high_fuses=0xdc
atmega8o.bootloader.path=optiboot
atmega8o.bootloader.file=optiboot_atmega8.hex
atmega8o.bootloader.unlock_bits=0×3F
atmega8o.bootloader.lock_bits=0×0F
atmega8o.build.mcu=atmega8
atmega8o.build.f_cpu=16000000L
atmega8o.build.core=arduino
##############################################################
4. スケッチの書き換え
モーター制御用のファイル一式を以下からダウンロードします。
http://squeakland.jp/abee/tmp/NanoBoardAGWithMotor.zip
従来のSensorBoardWithMotorの改良版です。以後はこちらをお使いください。
NanoBoardAGWithMotor.zipを展開し、NanoBoardAGWithMotor.pdeをArduino IDEで開きます。
「Tools」メニューの「Board」から「[Optiboot] ATmega8 8MHz」(1.2以降の場合)か「[Optiboot] Arduino NG or older w/ ATmega8」(1.1以前の場合)を選びます。
「Tools」メニューの「Serial Port」からなのぼ~どがつながれているポートを選びます。
「File」メニューから「Upload to I/O Board」を選んでスケッチをアップロードします。「Done uploading.」と表示されれば成功です。
5. Scratchからの制御
センサーのみを使うのであれば普通のScratchから使えます(使用方法は
こちら
)。
NanoBoardAGWithMotor.zipに含まれるNanoBoardAGWithMotor.imageとNanoBoardAGWithMotor.changesをScratchをインストールしたフォルダーにコピーします(WindowsのデフォルトはC:\Program Files\Scratch)。
NanoBoardAGWithMotor.imageをScratch.exeにドロップして起動します。
「ファイル」メニューの「開く」から、SensorBoardWithMotorTest.sbを探して開きます。
緑の旗をクリックして実行し、なのぼ~どのスライダーでモーターの回転数、ボタンで回転方向が変わることを確認します。
これが大丈夫なら、以後はWeDoと同じようにスクリプトから扱うことができます。
これを使ったプロジェクトの例は
フィジカルコンピューティングの例題
にもある他(
動画
)、zipを展開したProjectsフォルダーにも同じ物が入っています。
WeDoの使い方は「
スクラッチ+ WeDoではじめる簡単ロボティクス
」、LEGOテクニックのデザインパターンについては「
LEGO Technic 虎の巻
」をお勧めします。
Links to this Page
abee's scratch mods
last edited on 22 July 2018 at 1:05:53 pm by KD106161106134.au-net.ne.jp
NanoBoardAGで2つのモーターを使う方法
last edited on 11 July 2012 at 10:10:41 pm by softbank219195146128.bbtec.net